


研究内容
研究紹介
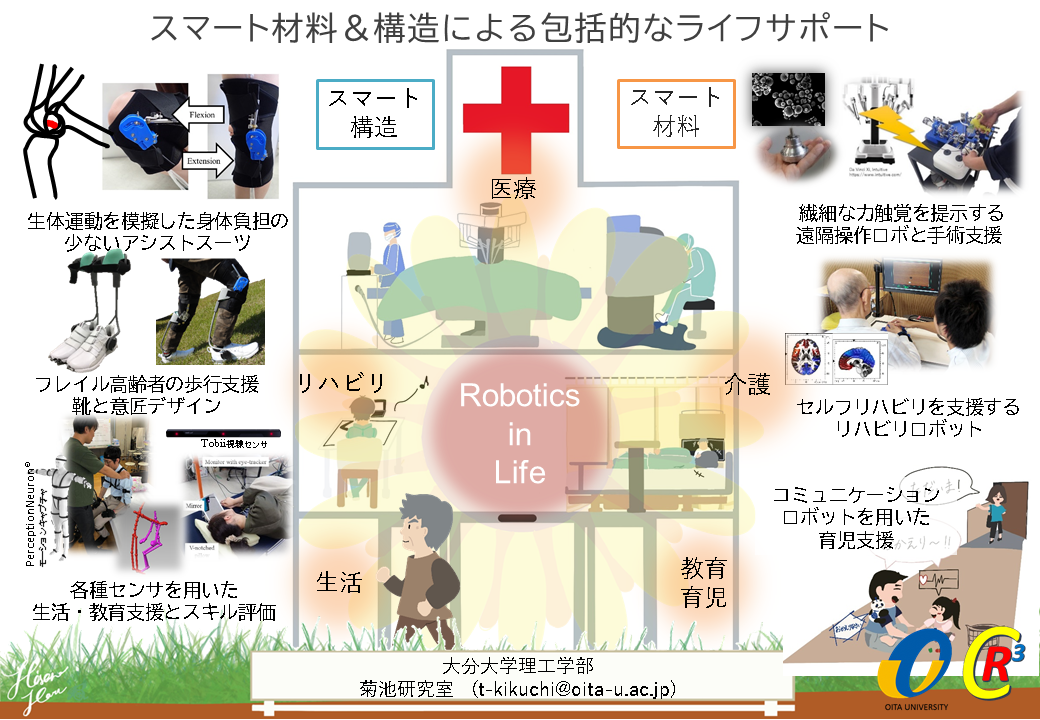
次世代ロボット技術はヒトとの直接的な接触を前提としているものが多く,これまでのロボティクス・メカトロニクス機器以上に安全への配慮が重要な課題です.私たちは,機能性材料(電気・磁気粘性流体,磁気応答性エラストマー,形状記憶合金等)や柔軟関節,それらを組み合わせたスマート構造を用いて,安全性の高い医療・リハビリテーションロボット・インテリジェント福祉機器の開発を行っています.本研究室では積極的な医工連携研究を実施しています.
研究紹介(ポスター) クリックで別ウィンドウが開きます
 |
 |
 |
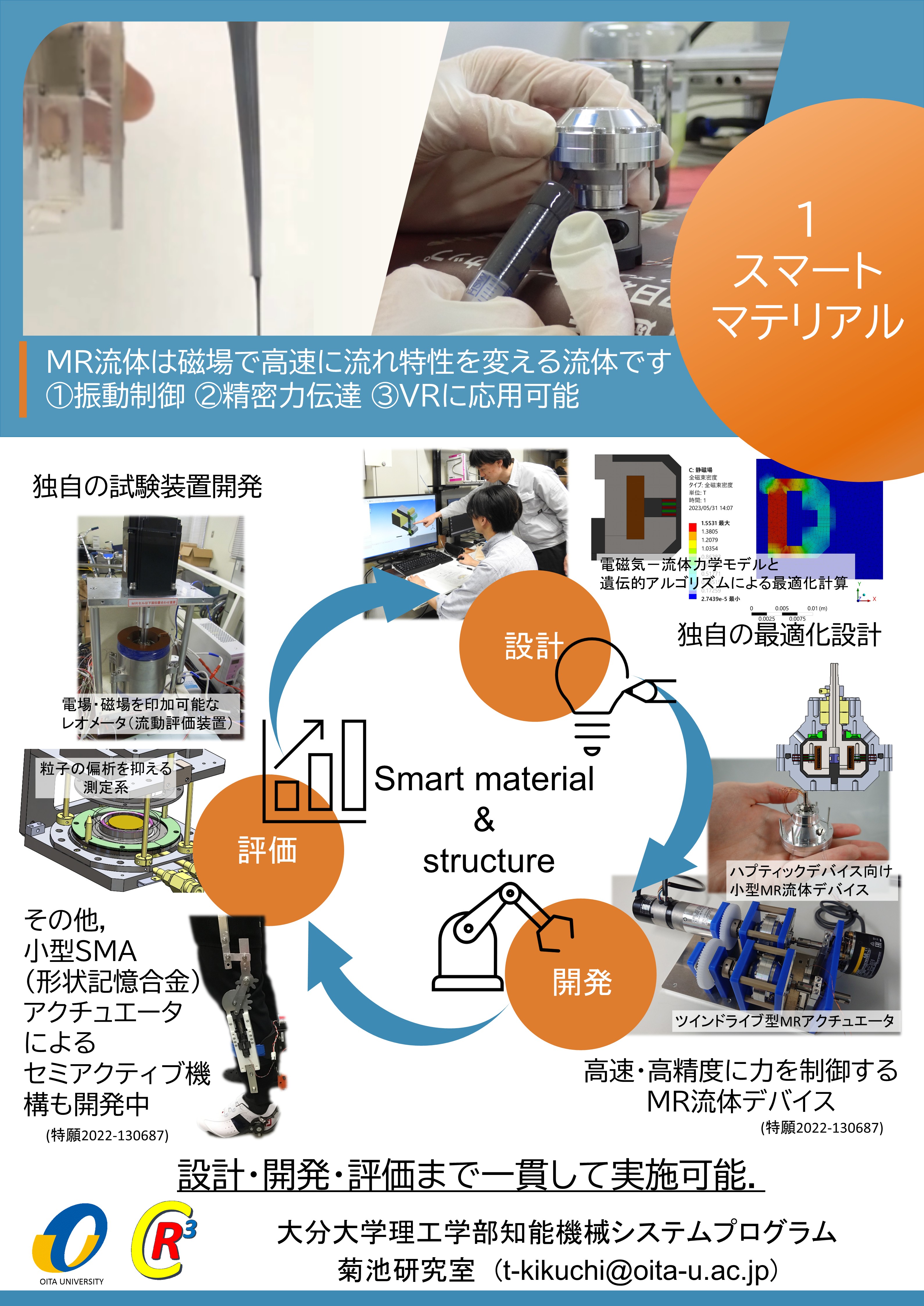
| 研究室パンフレット2023 (3ページ) |
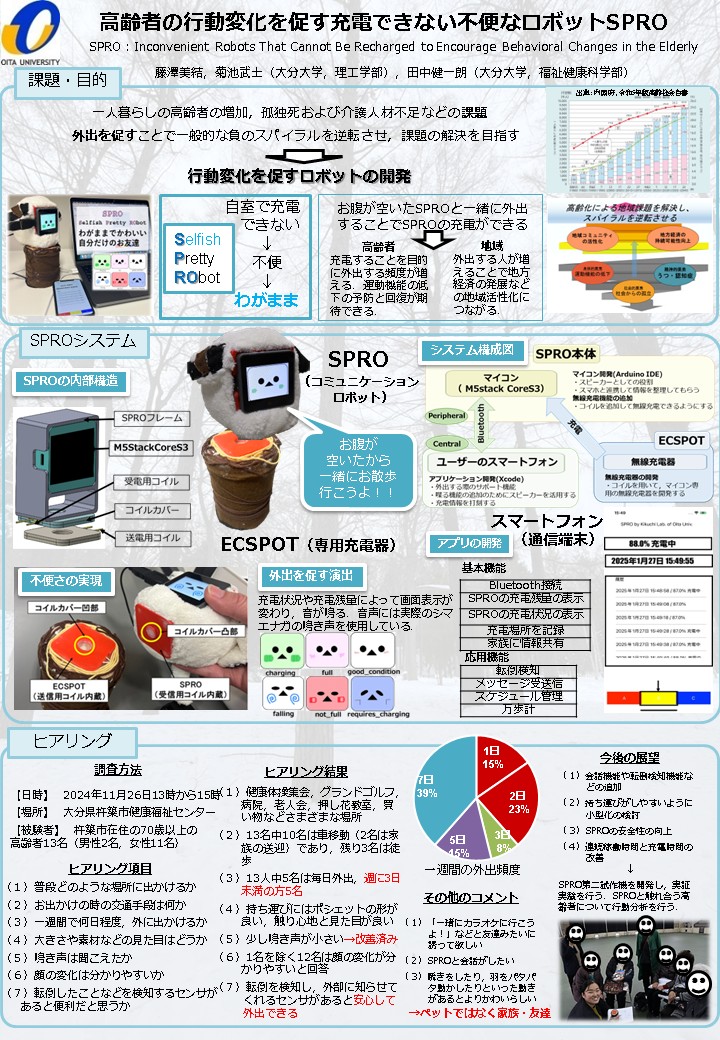
高齢者の行動変化を促す充電できない不便なロボットSPRO (HAI2025 by Fujisawa) |
MR流体アクチュエータを搭載したデルタ型ハプティックデバイスの改良と評価 (Robomech2024 by Matsushita) |
 |
 |
 |
| 小型人工透析システムのためのローラポンプにおけるシェルの形状が流量に与える影響の調査 (SI2024 by Komatsu) |
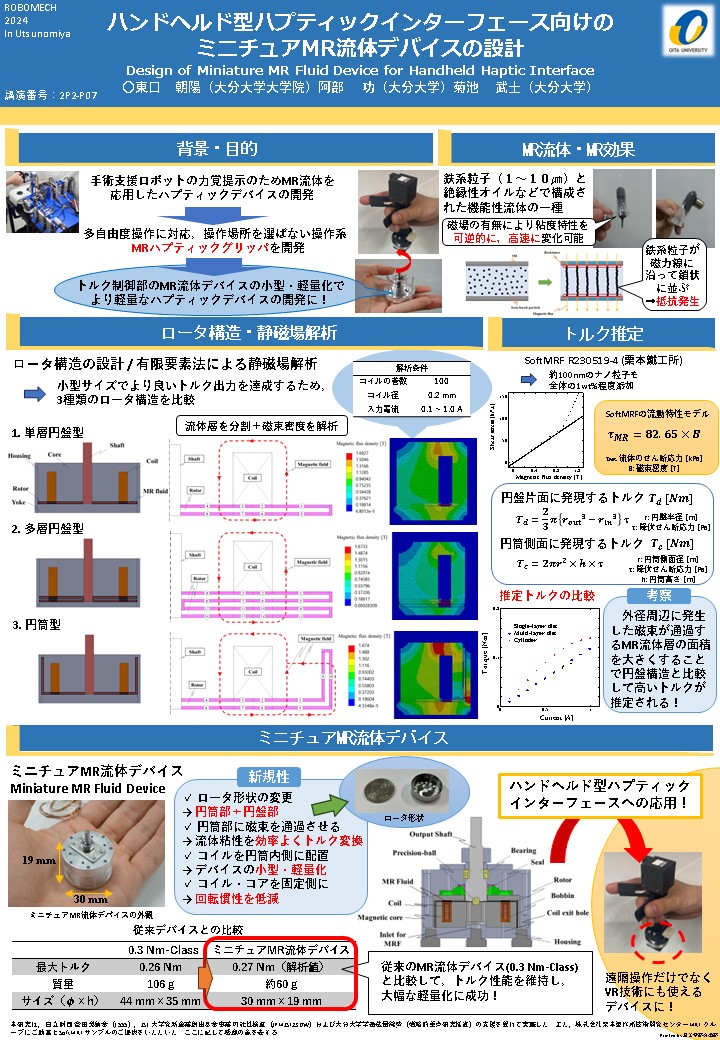
ハンドヘルド型ハプティックインターフェース向けのミニチュアMR流体デバイスの設計 (Robomech2024 by Higashiguchi) |
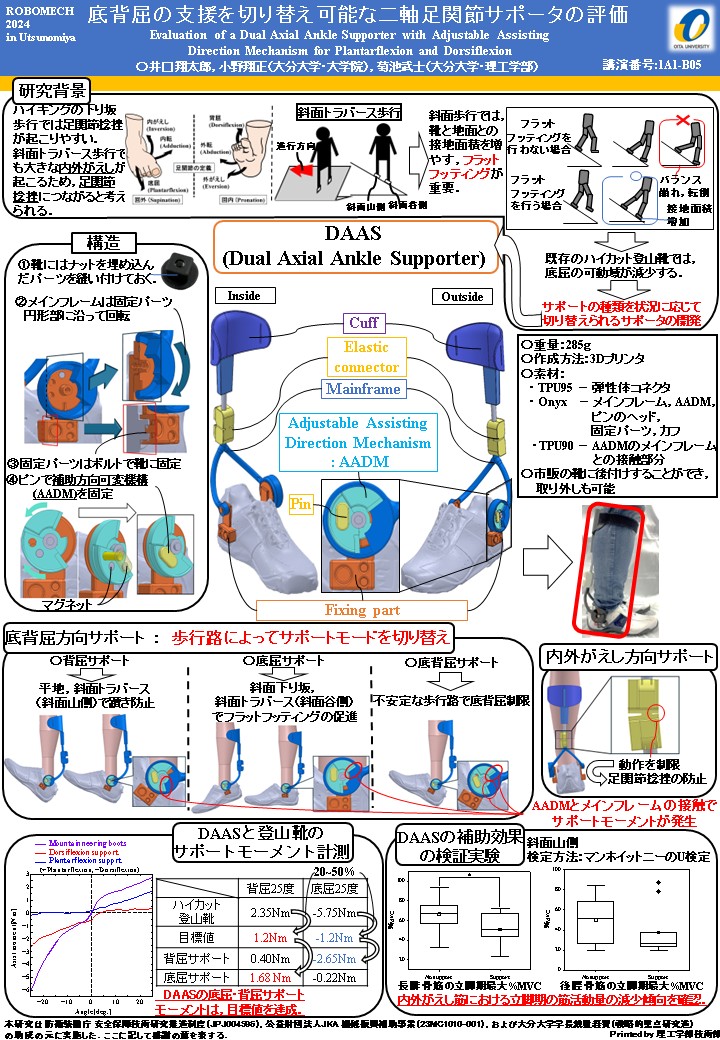
底背屈の支援を切り替え可能な二軸足関節サポータの評価 (Robomech2024 by Iguchi) |
 |
 |
 |
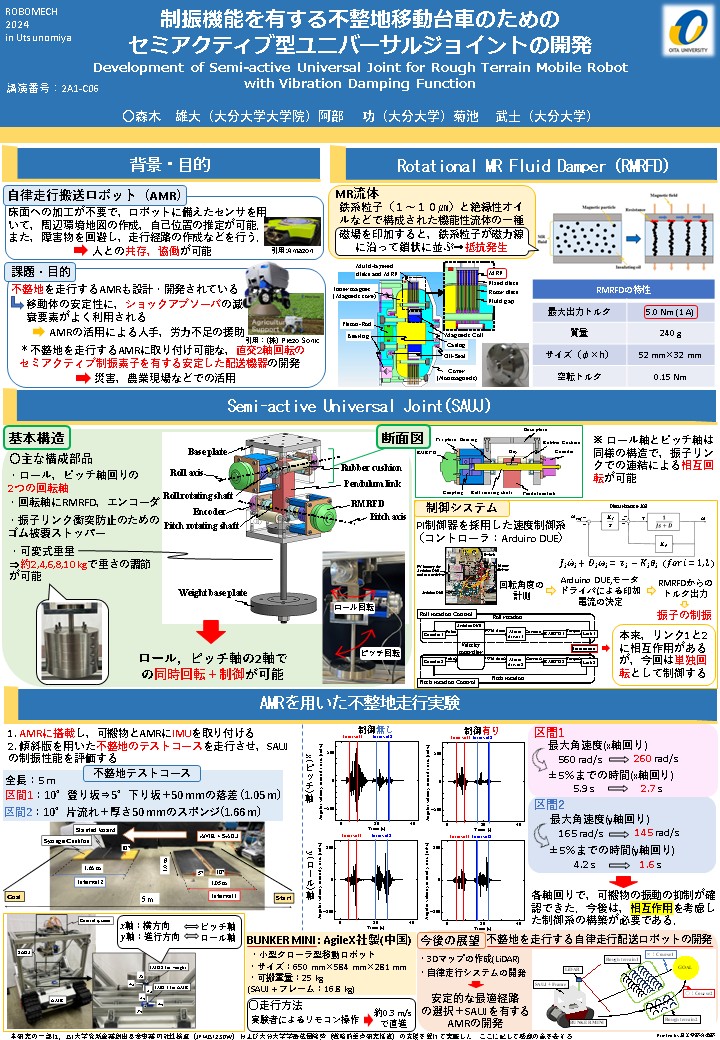
| 制振機能を有する不整地移動台車のためのセミアクティブ型ユニバーサルジョイントの開発 (Robomech2024 by Moriki) |
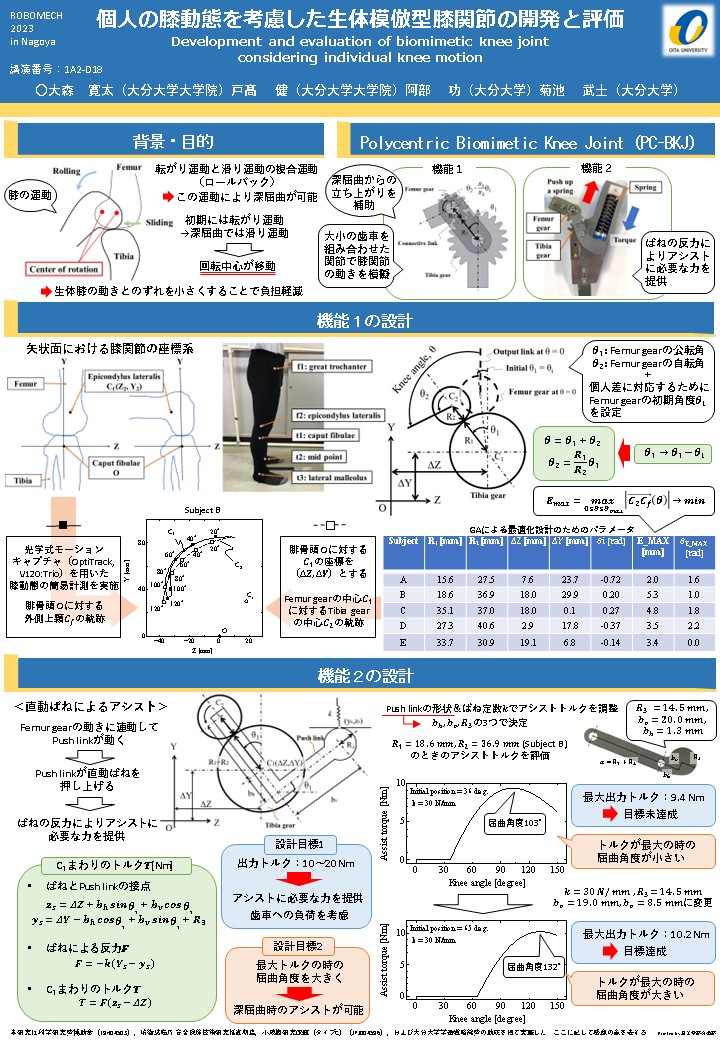
個人の膝動態を考慮した生体模倣型膝関節の開発と評価 (Robomech2023 by Omori) |
不整地歩行を支援する義肢装具開発のための片流れ斜面歩行の分析 (Robomech2023 by Watanabe) |
 |
 |
 |
| フレイル高齢者用の背屈サポートユニットの改良と効果検証実験 (Robomech2022 by Ono) |
ツインドライブMR流体アクチュエータを用いたデルタ型ハプティックデバイスの力覚提示性能の評価 (Robomech2022 by Ikeda) |
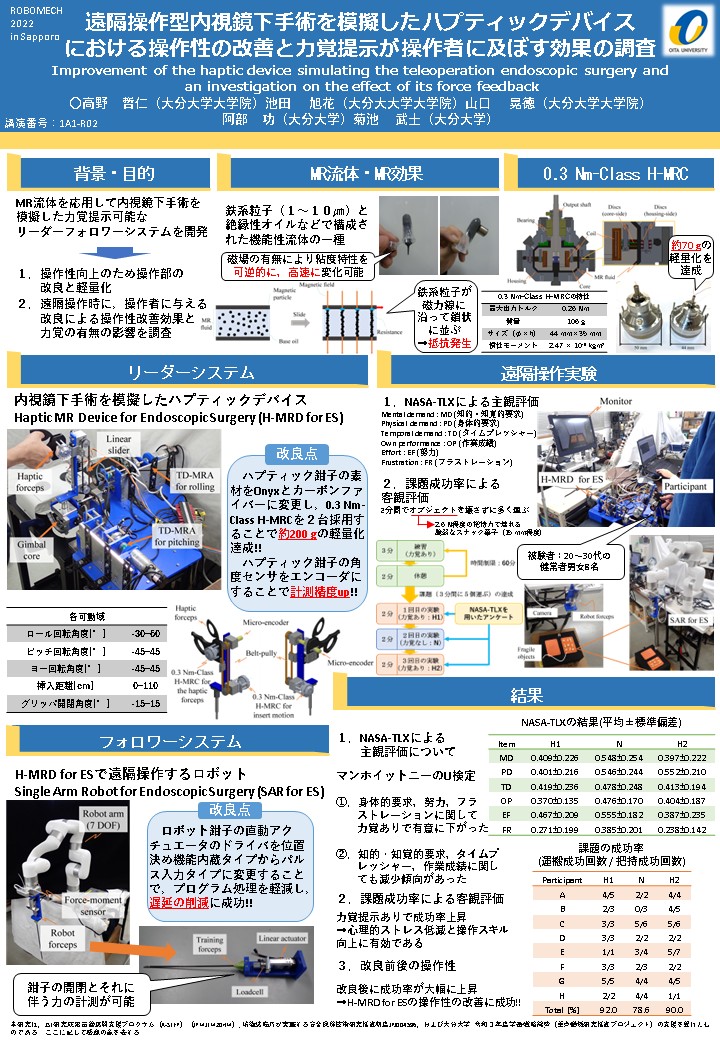
遠隔操作型内視鏡下手術を模擬したハプティックデバイスにおける操作性の改善と力覚提示が操作者に及ぼす効果の調査 (Robomech2022 by Takano) |
研究紹介(Youtube)
- Robomech2021_1P2C02 MR流体を用いた遠隔手術向け力覚デバイスのための評価システム 2021.6
- Robomech2021_1A1C04 フレイル高齢者の歩行意欲を高める背屈サポートユニットの提案 2021.6 (日本機械学会 若手講演フェロー賞受賞)
- Robomech2021_1A1C03 個人の顔に適合したフェイスマスクの型紙生成アプリの開発と適合度の評価 2021.6 (日本機械学会 若手講演フェロー賞受賞)
- Robomech2021_1A1C02 メル周波数ケプストラム係数に対するガウス関数型評価器による咳嗽抽出の検討 2021.6 (日本機械学会 若手講演フェロー賞受賞)
- RO-MAN2021_KikuchiT / Design of Polycentric Assistive Device for Knee Joint 2021.8
- SII2020_KikuchiT / Motion Analysis of Transfer Operation from Bed to Wheelchair for Care-giver and -receiver with Wearable Motion Capture 2021.1
- 繊細な力覚を提示するハプティックデバイス向けMR流体アクチュエータ【大分大学産学官連携推進機構】2021.8
- ロボット+機能性材料+リハビリ【夢ナビTALK】2016.10
- 患者のアドヒアランスを高めるリハビリゲームのスコア表示法【中山隼雄科学技術文化財団 第23回研究成果発表会】 2016.9
研究紹介(カテゴリー別)
カテゴリーA:
スマート材料ロボティクス- A1: スマート材料を応用したメカトロニクスデバイス
- A2: 遠隔操作型手術支援ロボットのための繊細な力触覚提示を行うMR流体デバイス
- A3: セルフリハビリテーションを支援するリハビリロボット D-SEMUL
- A4: インテリジェント制御型短下肢装具 i-AFO
- A5: インテリジェント制御型歩行車 i-Walker
- A6: 円筒型MR流体ブレーキを用いたバーチャルサイクリングシステム VR Cycling
- A7: ハプティックデバイスを用いたバーチャルウォーキングシステム VR Walking
カテゴリーB:
スマート構造ロボティクス- B1: 弾性体内蔵型柔軟関節をもちいた短下肢装具, EEFJ-AFO
- B2: フレイル高齢者のための歩行支援靴, EEFJ-Shoes
- B3: 生体関節機構を規範としたパワーアシスト, Active BKJ
- B4: 生体関節機構を規範とした装具, Passive BKJ
- B5: 可変ベルトを用いた新規な座位保持装置, i-Seating
カテゴリーC:
ロボットテクノロジーを用いた教育支援とスキル評価- C1: 安価な視線計測センサと鏡面反射を利用した視線計測法
- C2: 移乗動作最適化のための装着型モーションキャプチャを用いた動作分析
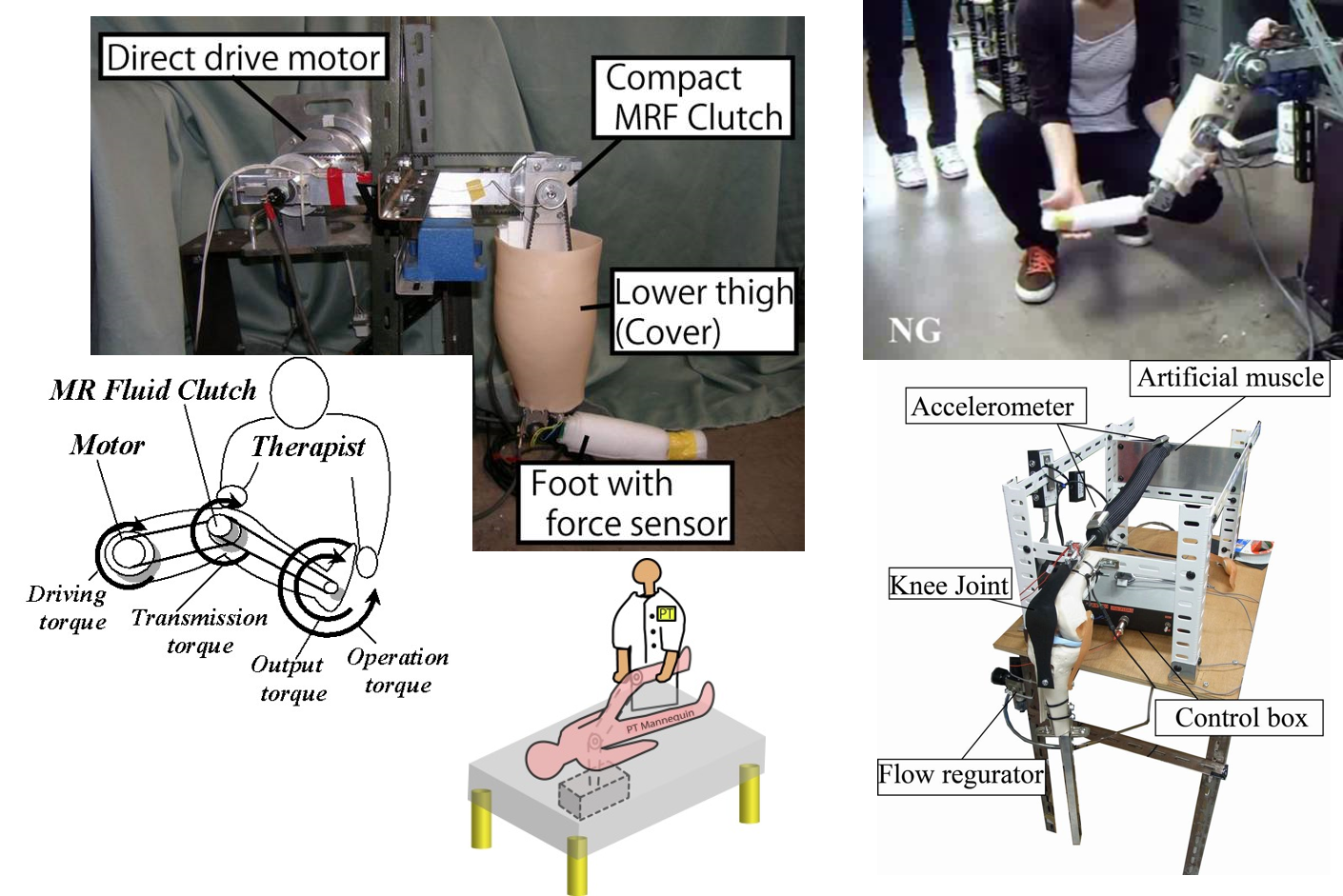
- C3: 患者シミュレータによる医学教育支援
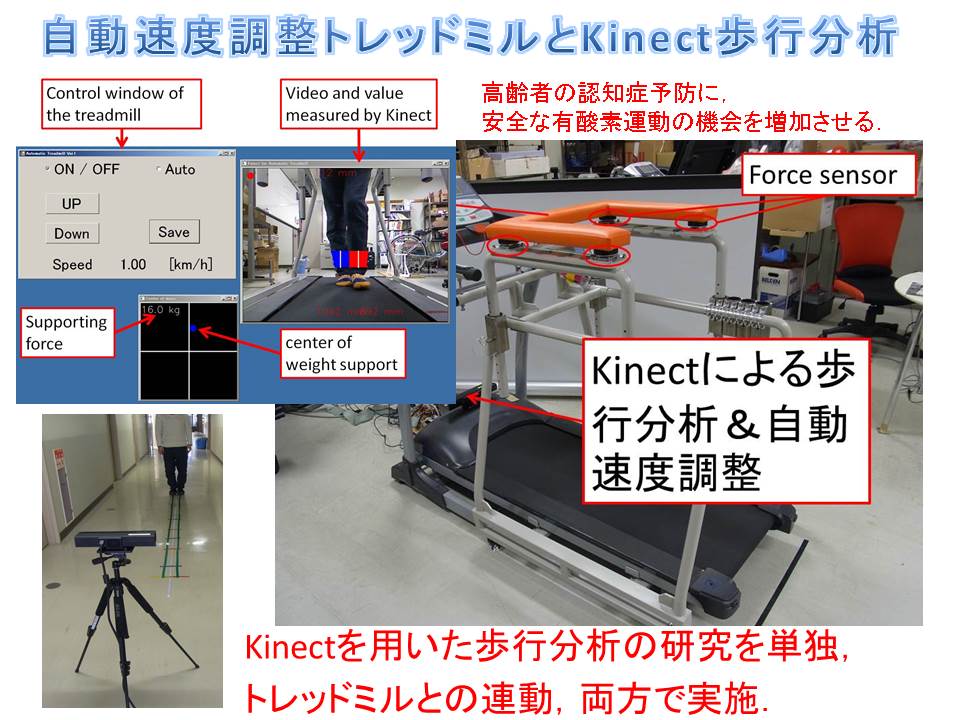
- C4: 自動速度調整トレッドミルと歩行分析
カテゴリーA:
|
|
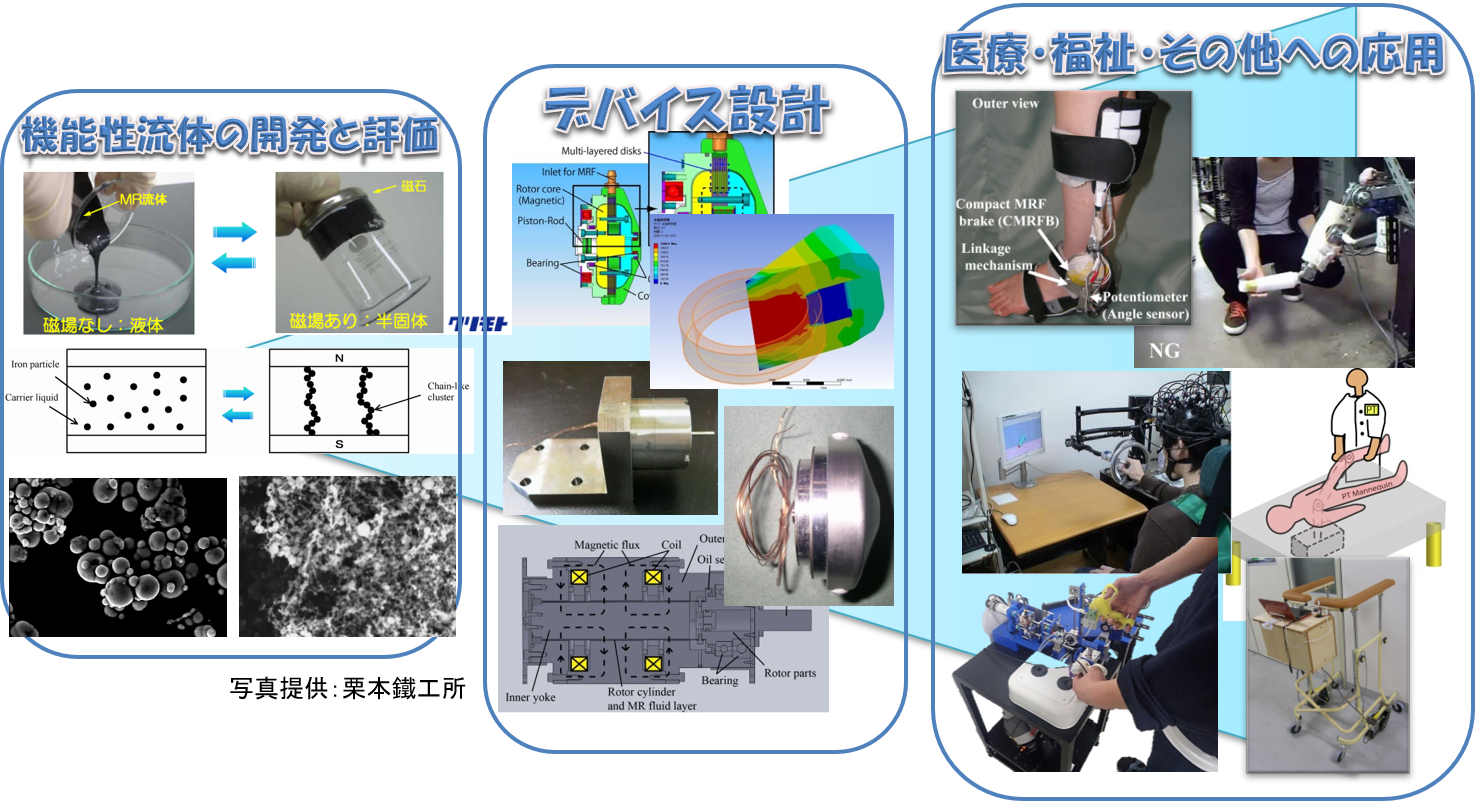
(A1) スマート材料を応用したメカトロニクスデバイス電場(Electric field)や磁場(Magnetic field)の変化によって硬さや流れやすさが 変化する流体を機能性流体(Functional fluid)と言います. 当研究室ではMR流体(Magnetorheological fluid),ER流体 (Electrorheological fluid),磁性エラストマー (Magnetic field sensitive elastomer)を用いたメカトロニクスデバイスの設計と 開発を行っています.さらに,開発したデバイスを医療・福祉・その他の工業分野に 応用するための研究も実施しています. |
|
(A2) 遠隔操作型手術支援ロボットのための繊細な力触覚提示を行うMR流体デバイス, MR-Haptic Master遠隔操作型手術支援ロボットは今後ますます普及するものと考えられていますが,術者への力フィードバックは十分に行われていないのが現状です.私たちは,繊細な力制御が可能なMR流体アクチュエータを開発しました.現在,これを遠隔操作型手術支援ロボットに応用することを目指しています. |
MR流体デバイスと手術支援ロボットの紹介ビデオ |
(A3) セルフリハビリテーションを支援するリハビリロボット, D-SEMUL我々が現在開発している卓上型上肢リハビリテーションロボットD-SEMULは,機能性流体ブレーキを用いた抵抗力提示型ハプティックインタフェースであり,モータの暴走を心配する必要がないために本質的に安全な装置です.D-SEMULでは,ソフト,ハードの両面から,ユーザに使いやすいユーザインタフェースの開発を進めています. ロボットリハのプログラムは,ユーザとロボット(もしくはVR空間の仮想オブジェクト)の相互作用によって,困難性を乗り越えて数値目標を達成(向上)させるという意味でゲームとしてとらえることができ,その設計手法を参考にすることが重要と考えています.特に重要なことは,訓練モチベーションを向上させる演出でしょう.現在われわれは,D-SEMULと脳波計,および逆解析手法(sLORETA)を用いることによって,訓練直後の評価画面の演出方法が訓練モチベーションにどのように影響するかを調査しています. |

|
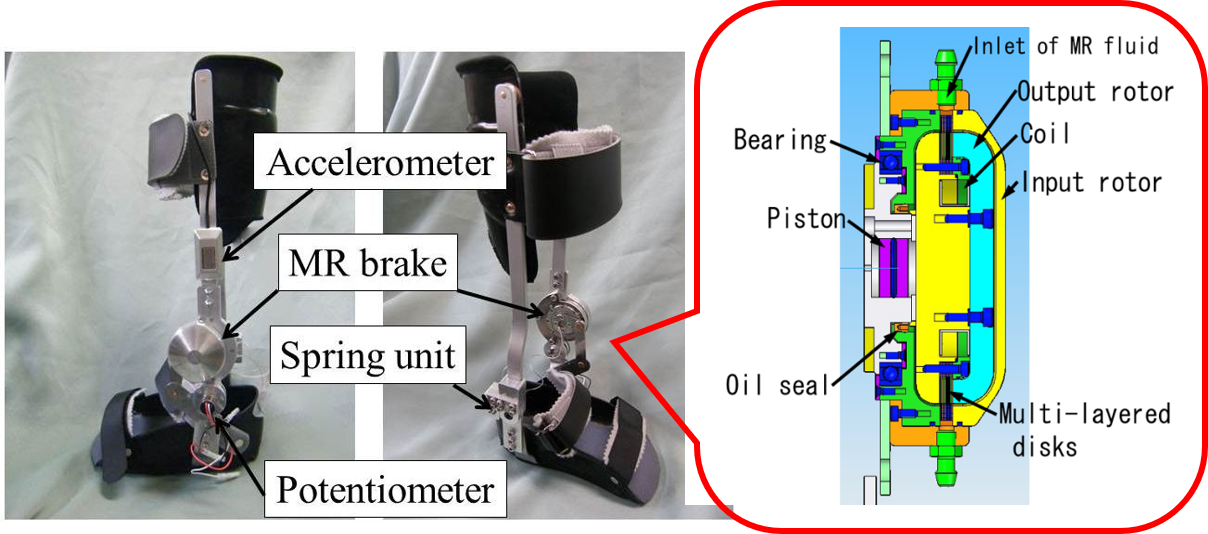
(A4) インテリジェント制御型短下肢装具, i-AFO |
|
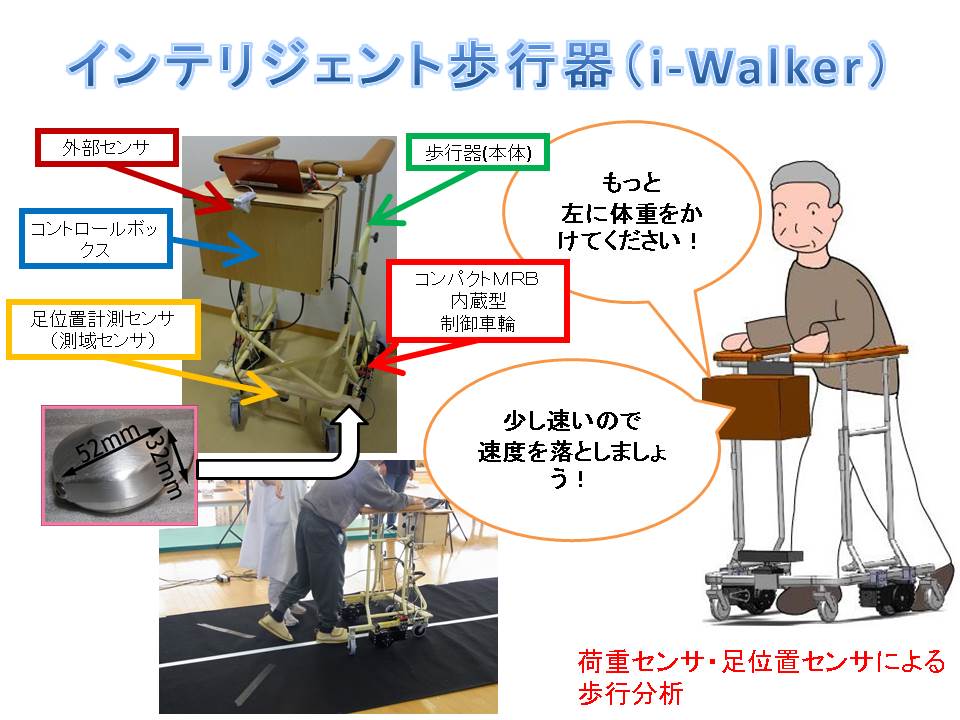
(A5) インテリジェント制御型歩行車, i-Walker
|
|
(A6) 円筒型MR流体ブレーキを用いたバーチャルサイクリング, VR Cycling本研究では,円筒型ロータとマルチコイル構造を有する新規なMR流体ブレーキの 開発と,これを応用したバーチャルリアリティ自転車の開発を目的としています. 仮想空間サイクリングにおける細やかなペダル抵抗をMR流体ブレーキによって 実現します.また,このサイクリングシミュレータに対して, 新たに道路環境CG作製システムを開発し,さらにこれを統合することで 新規な高臨場感自転車シミュレータを開発しました. 交通心理学の実験,交通教育,都市開発に応用できます. この研究は,財団法人JKAの支援により実施しました. |

|
(A7) ハプティックデバイスを用いたバーチャルウォーキング, VR Walking本研究では,超臨場感バーチャルリアリティシステムの一つの要素として足底面への力触覚を提示可能な新規なデバイスを磁性エラストマーを用いて開発し,これを応用した仮想空間歩行システムを構築しました.この研究は,総務省SCOPE,科学研究費補助金等の支援により実施しました. |

|
カテゴリーB:
|
|
(B1) 弾性体内蔵型柔軟関節をもちいた短下肢装具, EEFJ-AFO我々は弾性体内蔵型柔軟関節(Elastomer-Embedded Flexible Joint,以下,EEFJ)を考案し,歩行中の足首の運動補助に用いることを検討しました.EEFJは,湾曲した板ばねとそれに内包されるゴム状部品の相互作用によって非線形性を有する力学特性を持たせることができます.これにより,歩行中の底屈-背屈方向の足首回りの補助モーメントに方向による異方性を持たせることができ,関節部品の調整可能性を拡張することが可能です.また,内包するゴム状部品は3Dプリンター等を使って異なる弾性率を手軽に再現できます.我々は,このEEFJを脳卒中片麻痺者が使用する短下肢装具(AFO)に応用することを検討しました.このEEFJ型AFOは,従来の弾性体を利用したAFOのような調整容易性を有しながら,ばねやオイルダンパで底背屈に力学的異方特性を付加した単関節型AFOと同様の力学特性を得ることができました. |

|
(B2) フレイル高齢者のための歩行支援靴, EEFJ-Shoes近年,健康障害や死亡などを起こしやすい病態であるフレイルが注目されています.日本老年医学会によるとフレイルとは要介護状態に陥りやすい状態であり,しかるべき介入により健常状態に戻ることができると考えられています.そこで我々は,介護予防の観点から,適切な工学的サポートが重要と考え,フレイル高齢者の歩行軽減を行う足首サポートシューズの開発を目指しています. 本研究は競輪の補助を受けて実施しました。 |
EEFJを用いた背屈サポートユニット(DSU)の紹介ビデオ |
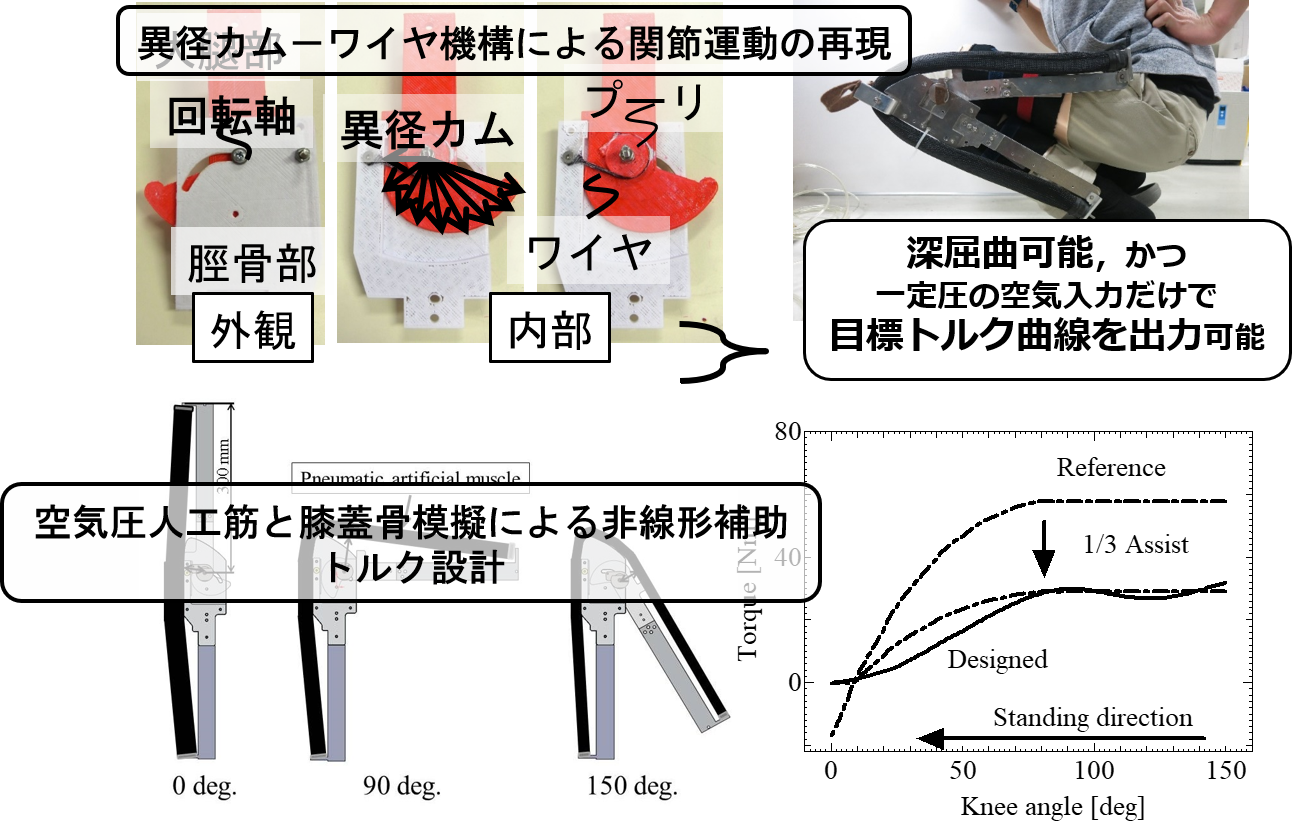
(B3) 生体関節機構を規範としたパワーアシスト, Active BKJ人間の力を増幅させるパワーアシストシステムの研究が盛んにおこなわれていますが, このような人と機械が直接的に接するシステムにおいては使用者に対する安全確保が 最重要課題です. これまでのパワーアシスト装置は多くが回転中心が固定されているために 人間の複雑な関節運動に細かく適合することが難しく, 中心の不一致は装着者に違和感を与えるだけでなく, 人体に余計な負担を与える可能性もあります. 本研究では,生体関節の動きを規範とした関節機構を開発し, パワーアシストスーツに応用することを目的としています. |
|
(B4) 生体関節機構を規範とした装具, Passive BKJ本研究では,トーションバネを用いたパッシブ型BKJアシスト装具を開発しました.現在,このパッシブ型BKJアシスト装具の効果を検証するために,立ち上がり動作の筋電および人間機械間のせん断方向の負担を評価しています.せん断方向の負担として,本研究室ではShear force Sensitive Sheet (SSS)を開発しました.SSSは,転写シート (Copy sheet),凹凸シート(Patterned sheet),記録シート(Recording sheet)の三つのシートで構成され,人間-機械間の接触部に挟んでせん断方向の応力とずれ量を推定することができます. |
Polycentric機構を用いたPassive BKJの紹介ビデオ |
(B5) 可変ベルトを用いた新規な座位保持装置, i-Seating |

|
カテゴリーC:
|
|
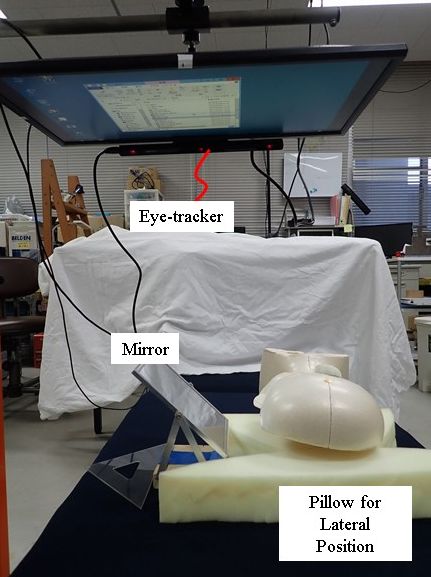
(C1) 安価な視線計測センサと鏡面反射を利用した視線計測法 |
|
(C2) 移乗動作最適化のための装着型モーションキャプチャを用いた動作分析 |

|
(C3) 患者シミュレータによる医学教育支援 |
|
(C4) 自動速度調整トレッドミルと歩行分析本研究では,Microsoft Kinectセンサを用いた歩行分析システムの開発と, これを応用した自動速度調整トレッドミルの開発を行っています. 安全装置として開発した力センサ内蔵センサフレームは,筋力不足や認知力低下で 転倒リスクの高いユーザの転倒予防だけでなく,歩行中のサポート力を計測し 支持力を含めた新たな歩行分析を可能とします. Kinectによる歩行分析は,それ単独でも医療施設での簡易な分析装置として 開発を実施中です. |
|